{kind=link}
 |
mathematics that studies the properties of spatial objects from their inherent connectivity while ignoring the detailed form. The examples in Figure 04 shows that the 2-dimensional objects are separated into different class (space) according to the number of holes in them. Objects in each space have the same topology as long as they can be moulded into each other by deformation, twisting and stretching but no discontinuous operation such as cutting. Topology in higher dimension is more complicated than the 2-dimensional example, but the general idea remains the same. The classification of topological equivalent objects depends on the Euler characteristic  = V - E + F, where (for 1 or 2 dimensional object) the number of vertices V = # of (n+1) or more edges meeting at a point + # of end points (n is the dimension of the object), the number of edges E = # of intersections of 2 faces or more + # of boundaries, and F is the number of faces. Table 01 shows some of the geometric objects = V - E + F, where (for 1 or 2 dimensional object) the number of vertices V = # of (n+1) or more edges meeting at a point + # of end points (n is the dimension of the object), the number of edges E = # of intersections of 2 faces or more + # of boundaries, and F is the number of faces. Table 01 shows some of the geometric objects |
Figure 04 Topology |
together with the Euler characteristic. The objects with the same Euler characteristic belong to the same topological class even though they could look very different. |

Table 01 Euler Characteristic for some Geometric Objects 
 |
1. For 1 complex dimensional manifold, there is just one Chern class, the first Chern class, which equals the Euler characteristic. In Figure 05, the complex 1-D sphere has 2 spots with zero net flow implying a first Chern class = Euler characteristic = 2, while the torus has no such spots and has first Chern class = Euler characteristic = 0. 2. The 2 complex dimensional manifold has a first and a second Chern class. The first one assigns an integer coefficients to subspaces (the 1-D manifold within the 2-D manifold), while the second one (the last one) always equals to the Euler characteristic. 3. The n complex dimensional manifold has a first and a second, ... nth Chern classes. The |
Figure 05 1-D Chern Classes |
first one assigns an integer coefficients to subspaces (the 1-D manifold within the n-D manifold), while the second one assigns another number to subspaces (the 2-D manifold within the n-D manifold), ..., the last one always equals to the Euler characteristic. |
 , 1911 - 2004), who was a Chinese mathematician and the mentor of S. T. Yau.
, 1911 - 2004), who was a Chinese mathematician and the mentor of S. T. Yau.  |
K = |d(dy/dx)/dx| / [1+(dy/dx)2]3/2 ---------- (1) while the square of an element of an arc on the curve is : ds2 = [1+(dy/dx)2] dx2 ---------- (2) The factor in front of dx2 is the 1 dimensional metric tensor g11 for a smooth manifold. An Euclidean example is a straight line described by the formula : y = ax + b ---------- (3) which produces K = 0, and ds2 = (1+a2) dx2. For a horizontal line such as the one shown in Figure 06, a = 0 and ds = dx. A circle provides an 1 dimensional non-Euclidean example, it is expressed by the formula : x2 + y2 = r2 ---------- (4) which yields K = 1/r ---------- (5), |
Figure 06 Curvature of 1-D Object [view large image] |
and ds2 = r2/(r2 - x2) dx2 ---------- (6).
Note that there are two singularities at x =  r. However, integration from x=-r to x=r returns a finite arc length of s = r. However, integration from x=-r to x=r returns a finite arc length of s =  r. r. |
Defining curvature for 2 dimensional object is more complicated because there are infinite number of curves that can pass through any point on the surface. Followings are some of the various definitions, which are related to the understanding of Calabi-Yau manifold :
1. Gaussian Curvature - The Gaussian curvature K is defined by multiplying the largest curvature k1, and smallest curvature k2 (i.e., K=k1k2) of the family of sectional curves perpendicular to the tangent plane at a given point as shown in Figure 07 at the saddle point of
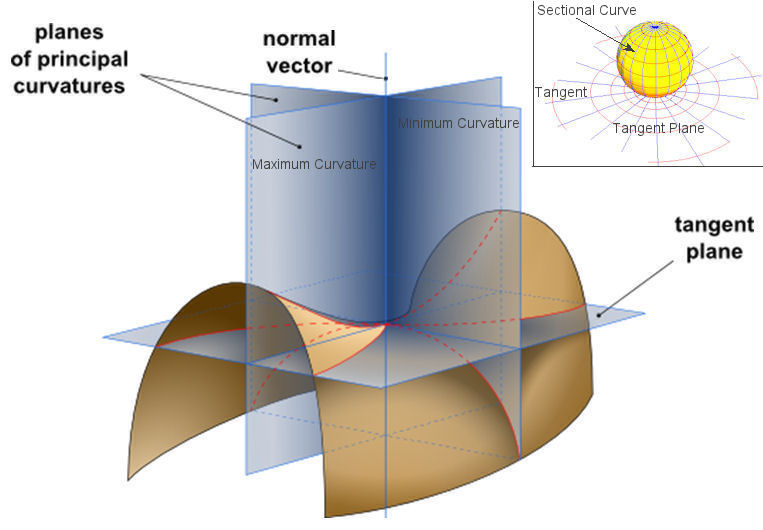 |
the hyperbolic paraboloid surface. According to the Gauss-Bonnet Theorem the sum of the Gaussian curvatures over the whole surface equals to 2 multiplied the Euler characteristic , i.e. : A K dA = 2 ---------- (7) A K dA = 2 ---------- (7)This theorem means that the overall curvature of the surface is fixed. Bending and pulling the surface may alter the curvature at every point, but these changes all cancel each other out. A trivial example is the surface of a sphere with unit radius (see insert in Figure 07). Its Gaussian curvature is 1 everywhere and |
Figure 07 Curvature of 2-D Object [view large image] |
the total surface area is 4. Thus = 2, which is the same as calculated previously by another method. See pseudosphere for an example of constant negative curvature. |
2. Ricci Curvature - For higher dimensional manifolds (> 2-D), there are more than one tangent plane going through a point on the surface. The Ricci curvature is the average of the Gaussian curvatures associated with all these planes. Thus, a manifold can be Ricci flat (Ricci curvature = 0) without being flat overall. For the 2-D spherical manifold in Figure 07, the Ricci curvature equals to the Gaussian curvature since there is only one tangent plane. The Ricci curvature tensor Rik appears in the 4 dimensional General Relativity Field Equation as :
Rik - gikR/2 = 8
GTik/c4 ---------- (8)
| where |  , , |
R = gikRik is the scalar curvature, gik is the metric tensor in the |
 |
is the Christoffel symbol, and Tik is the energy-momentum tensor, the indices |
3. Riemann Curvature - This is the curvature that completely determines the form of a manifold. It has 20 components (in 4 dimensions) splitting half into the Ricci tensor and the other half into the Weyl tensor. The Weyl tensor does not convey information on how the volume of the body changes, but rather only how the shape of the body is distorted by the tidal force or gravitational radiation. In dimensions 2 and 3 the Weyl curvature tensor vanishes identically. In dimensions
 4, the Weyl curvature is generally nonzero.
4, the Weyl curvature is generally nonzero.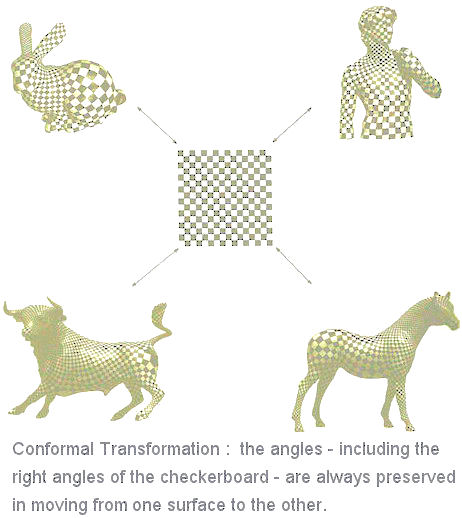 |
|
Figure 08 Conformal Mapping [view large image] |
{kind=link}
{kind=link}
1. It is a complex manifold.
2. It is in between the Hermitian and flat manifolds in the sense that for a small displacement
 the metric gik varies as and 0 respectively, while the Kahler manifold changes as 2. Such manifold has already many existing mathematical tools for its further study.
the metric gik varies as and 0 respectively, while the Kahler manifold changes as 2. Such manifold has already many existing mathematical tools for its further study. |
3. Parallel transport is a process of moving vectors or spinors along a path on a manifold that keeps the lengths as well as the angles between any two vectors unchanged (see Figure 09a for moving a vector on spherical surface by maintaining a southerly direction and tangential to the surface. if the direction changes at the end of a closed path, then there is curvature over the path). 4. Holonomy Group contains all the elements, which are closed paths formed by parallel transport, e.g., the path 1, 2, 3 in Figure 09. |
Figure 09 Parallel Transport Symmetry [view large image] |
5. For a Ricci flat manifold, a vector or spinor retains its orientation after moving through a closed path. Such spinor is called "covariantly constant spinor" and is a member of the SU(3) (3 complex or 6 real dimensions) holonomy group. |
7. The Kahler manifold has the special property that it is symmetrical under the process of : J operation + parallel transport or vice versa, i.e., JW1 = W2 as shown in Figure 09b. This symmetry (known as internal symmetry) imposes another set of constraints on the mathematical formulation, drastically simplifying calculations.
 |
|
Figure 10 Calabi-Yau Manifold [view large image] |
of the 2 dimensional cross-section from a 6 dimensional Calabi-Yau manifold. |
and -) to the same conformal field theory (in a space one dimension lower). Such kind of duality always implies a simpler mathematical formulation in one of the alternatives.