| Home Page | Overview | Site Map | Index | Appendix | Illustration | About | Contact | Update | FAQ |
|
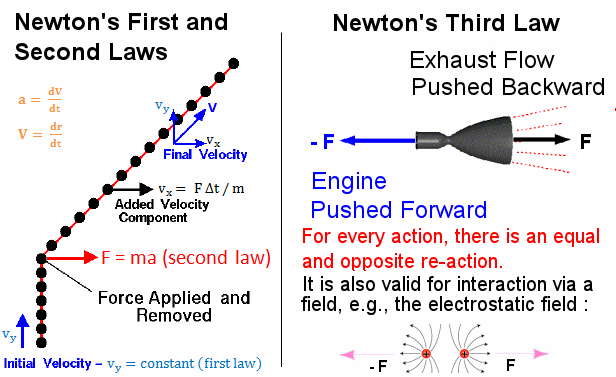
Classical mechanics describes the way objects move and interact in accordance with Newton's laws of motion (Figure 01a). The basic assumptions involve a frame of reference (x,y,z) with respect to which object with mass m moves, there is an independent time variable t to record the sequence of the movement, the gravitational or electromagnetic interaction between objects is instantaneous, and objects with geometric extent are often idealized as a point (with the justification that the size is much smaller than the distance involved). The basic equation is: |
Figure 01a Newton's 3 Laws [view large image] |
 |
where G is the gravitational constant, m1 and m2 are the masses of the two objects interacting via gravitation, r is the distance between these two objects, and (r/r) is an unit vector along the direction of r (see Figure 01b). If one of the objects is much heavier than the other, e.g., m1 >> m2 like the Sun / Earth system, then m1 can be placed in the origin of the coordinate system and Eq.(1) can be solved as a one-body problem. In case the two masses are similar, the problem can be reduced to a one-body problem with a fictitious object moving around the center of mass, and Eq.(1) is still applicable. The equation of motion becomes rapidly un-manageable for system of three bodies and beyond. Eq.(1) would be applied to all the objects and the force on one object would involve the interaction with all the others. This is the situation often encountered in celestial mechanics with spacecraft flying among planets. The solution is usually obtained by some kind of approximation and by numerical computation using large |
Figure 01b Gravitational Interaction |
computers. See Newton's Laws in cartoons. |
 |
Actually, Newton's equation of motion for many particles can be expressed in a deceivingly concise form : F1(r) = m1 d2r1/dt2, F2(r) = m2 d2r2/dt2, F3(r) = m3 d2r3/dt2, ... Fn(r) = mn d2rn/dt2, where r stands for the collective location of every particle in the system (and that's where the complication arised), and the subscript 1, 2, 3, ... n are referred to particle 1, 2, 3, ... n. For n astronomical objects interacting by gravity only, the total force acting on the jth object is in the form: Fj(r) =  - Gmjmi(rj - ri)/|rj - ri|3 - Gmjmi(rj - ri)/|rj - ri|3 |
Figure 01c Three-body Problem |
These set of equations are highly non-linear, the motion becomes very sensitive to the initial and boundary conditions even for the case of n = 3 (Figure 01c, click "refresh" to restart the motion). |
 |
d 2 = dx2 + dy2 + dz2 = dx'2 + dy'2 + dz'2 ---------- (5) 2 = dx2 + dy2 + dz2 = dx'2 + dy'2 + dz'2 ---------- (5)According to Eq.(4) if the velocity of light (in the x direction) is c in the S frame it would be c' = c - V in the S' (moving) frame. In classical mechanics, the "Absolute Frame of Reference" is a hypothetical entity identified as the frame of reference with the origin at the center of mass of system of fixed stars. Only with respect to this absolute frame of reference would the velocity of light equal to c = 3x1010 cm/sec. |
Figure 02a Galilean Transformation |
It was later suggested that the medium in which light propagates - the ether - would be an even better absoute frame of reference. |